Arduino 自定义库
买了一个PS2的手柄,希望写个库文件方便以后控制手柄,所以这里以PS2手柄库文件开发为例,研究如何自定义库,首先新建工程文件夹:
PS2_ESP8266
库格式
文件夹的组织类型如下:
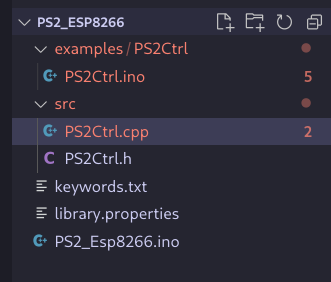
keywords.txt
这个文件内容可以为空
library.properties
这里定义一些库的属性
1 | name=PS2Ctrl |
src目录下库文件编写
这里主要写一个头文件,和对头文件的实现方法,用于实例调用
头文件: 定义了一个名为
PS2Ctrl_H的头文件,其内声明了一个PS2Ctrl类,编写构造方法和使用方法等。
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
typedef unsigned short u16;
typedef unsigned char u8;
class PS2Ctrl
{
public:
// 构造函数
PS2Ctrl(int di_pin, int do_pin, int cs_pin, int clk_pin);
// 用于示例的一些函数
void PS2_Cmd(unsigned char CMD); // 发送命令到手柄
void PS2_ReadData(); // 接收所有PS2控制数据
void PS2_ClearData();
void PS2_ShortPoll();
void PS2_EnterConfig();
void PS2_TurnOnAnalogMode(); // 打开模拟模式
void PS2_VibrationMode();
void PS2_ExitConfig();
void PS2_SetInit();
void PS2();
// 定义手柄接收器的四个针脚 传输的时候需要CS为低电平,CLK由高变低
int di_pin; //接收器发送给单片机的信号
int do_pin; //单片机发送给接收器的信号
int cs_pin; // 选择信号
int clk_pin; // 时钟信号
unsigned char SELECT, L3, R3, START, UP, RIGHT, DOWN, LEFT, L2, R2, L1, R1, TRIANGLE, CIRCLE, FORK, SQUARE;
unsigned char PS2_LX, PS2_LY, PS2_RX, PS2_RY;
};头文件的实现文件:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
PS2Ctrl::PS2Ctrl(int di_pin,int do_pin,int cs_pin,int clk_pin){
this->di_pin = di_pin;
this->do_pin = do_pin;
this->cs_pin = cs_pin;
this->clk_pin = clk_pin;
}
typedef unsigned short u16;
typedef unsigned char u8;
u8 Data[9];
u8 SELECT, L3, R3, START, UP, RIGHT, DOWN, LEFT, L2, R2, L1, R1, TRIANGLE, CIRCLE, FORK, SQUARE;
u8 PS2_LX, PS2_LY, PS2_RX, PS2_RY;
void PS2Ctrl::PS2_Cmd(u8 CMD)
{
volatile u16 ref = 0x01;
Data[1] = 0;
for (ref = 0x01; ref < 0x0100; ref <<= 1)
{
if (ref & CMD)
{
DO_H;
}
else
DO_L;
CLK_H;
delayMicroseconds(10);
CLK_L;
delayMicroseconds(10);
CLK_H;
if (digitalRead(DI_pin))
{
Data[1] = ref | Data[1];
}
}
delayMicroseconds(16);
}
void PS2Ctrl::PS2_ReadData(void)
{
volatile u8 byt = 0;
volatile u16 ref = 0x01;
CS_L;
PS2_Cmd(0x01);
PS2_Cmd(0x42);
for (byt = 2; byt < 9; byt++)
{
for (ref = 0x01; ref < 0x100; ref <<= 1)
{
CLK_H;
delayMicroseconds(10);
CLK_L;
delayMicroseconds(10);
CLK_H;
if (digitalRead(DI_pin))
{
Data[byt] = ref | Data[byt];
}
}
delayMicroseconds(16);
}
CS_H;
}
void PS2Ctrl::PS2_ClearData()
{
u8 a;
for (a = 0; a < 9; a++)
{
Data[a] = 0x00;
}
}
void PS2Ctrl::PS2_ShortPoll(void)
{
CS_L;
delayMicroseconds(16);
PS2_Cmd(0x01);
PS2_Cmd(0x42);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delayMicroseconds(16);
}
void PS2Ctrl::PS2_EnterConfig(void)
{
CS_L;
delayMicroseconds(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0x00);
PS2_Cmd(0x01);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delayMicroseconds(16);
}
void PS2Ctrl::PS2_TurnOnAnalogMode(void)
{
CS_L;
delayMicroseconds(16);
PS2_Cmd(0x01);
PS2_Cmd(0x44);
PS2_Cmd(0x00);
PS2_Cmd(0x01);
PS2_Cmd(0xEE);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
CS_H;
delayMicroseconds(16);
}
void PS2Ctrl::PS2_VibrationMode(void)
{
CS_L;
delayMicroseconds(16);
PS2_Cmd(0x01);
PS2_Cmd(0x4D);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x01);
CS_H;
delayMicroseconds(16);
}
void PS2Ctrl::PS2_ExitConfig(void)
{
CS_L;
delayMicroseconds(16);
PS2_Cmd(0x01);
PS2_Cmd(0x43);
PS2_Cmd(0x00);
PS2_Cmd(0x00);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
PS2_Cmd(0x5A);
CS_H;
delayMicroseconds(16);
}
void PS2Ctrl::PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfig();
PS2_TurnOnAnalogMode();
PS2_VibrationMode();
PS2_ExitConfig();
}
void PS2Ctrl::PS2(void)
{
PS2_ClearData();
PS2_ReadData();
LEFT = !(0x80 & Data[3]);
DOWN = !(0x40 & Data[3]);
RIGHT = !(0x20 & Data[3]);
UP = !(0x10 & Data[3]);
START = !(0x08 & Data[3]);
R3 = !(0x04 & Data[3]);
L3 = !(0x02 & Data[3]);
SELECT = !(0x01 & Data[3]);
SQUARE = !(0x80 & Data[4]);
FORK = !(0x40 & Data[4]);
CIRCLE = !(0x20 & Data[4]);
TRIANGLE = !(0x10 & Data[4]);
R1 = !(0x08 & Data[4]);
L1 = !(0x04 & Data[4]);
R2 = !(0x02 & Data[4]);
L2 = !(0x01 & Data[4]);
PS2_RX = Data[5];
PS2_RY = Data[6];
PS2_LX = Data[7];
PS2_LY = Data[8];
delay(100);
}
examples文件夹下
编写示例文件:新增一个文件
PS2Ctrl.ino内容如下:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
PS2Ctrl ps2Ctrl(12,13,14,15);
void setup()
{
Serial.begin(9600);
// 设置给PS2控制器的这几个接口模式
pinMode(ps2Ctrl.di_pin, INPUT);
pinMode(ps2Ctrl.do_pin, OUTPUT);
pinMode(ps2Ctrl.cs_pin, OUTPUT);
pinMode(ps2Ctrl.clk_pin, OUTPUT);
}
void loop()
{
// 读取PS2手柄数据
ps2Ctrl.PS2();
// 打印按键操作
SerialPrintKey();
}
void SerialPrintKey()
{
Serial.println("*********key list********");
Serial.print("L3:");
Serial.print(ps2Ctrl.L3);
Serial.println();
;
Serial.print("R3:");
Serial.print(ps2Ctrl.R3);
Serial.println();
;
Serial.print("START:");
Serial.print(ps2Ctrl.START);
Serial.println();
;
Serial.print("UP:");
Serial.print(ps2Ctrl.UP);
Serial.println();
;
Serial.print("RIGHT:");
Serial.print(ps2Ctrl.RIGHT);
Serial.println();
;
Serial.print("DOWN:");
Serial.print(ps2Ctrl.DOWN);
Serial.println();
;
Serial.print("LEFT:");
Serial.print(ps2Ctrl.LEFT);
Serial.println();
;
Serial.print("L2:");
Serial.print(ps2Ctrl.L2);
Serial.println();
;
Serial.print("R2:");
Serial.print(ps2Ctrl.R2);
Serial.println();
;
Serial.print("L1:");
Serial.print(ps2Ctrl.L1);
Serial.println();
;
Serial.print("R1:");
Serial.print(ps2Ctrl.R1);
Serial.println();
;
Serial.print("TRIANGLE:");
Serial.print(ps2Ctrl.TRIANGLE);
Serial.println();
;
Serial.print("CIRCLE:");
Serial.print(ps2Ctrl.CIRCLE);
Serial.println();
;
Serial.print("FORK:");
Serial.print(ps2Ctrl.FORK);
Serial.println();
;
Serial.print("SQUARE:");
Serial.print(ps2Ctrl.SQUARE);
Serial.println();
;
Serial.print("PS2_RX:");
Serial.print(ps2Ctrl.PS2_RX);
Serial.println();
;
Serial.print("PS2_RY:");
Serial.print(ps2Ctrl.PS2_RY);
Serial.println();
;
Serial.print("PS2_LX:");
Serial.print(ps2Ctrl.PS2_LX);
Serial.println();
;
Serial.print("PS2_LY:");
Serial.print(ps2Ctrl.PS2_LY);
Serial.println();
;
}
使用
将整个工程文件
PSE_ESP8266放入Arduino的libraries内,现在可以在第三方示例库中看到我们的示例了